Робот Сильвер
По легенде робот Сильвер разработан для исследования различных поверхностей. Область исследования разбита на квадраты. Все квадраты, которые видит робот, видны и программисту. Если робот выйдет за область видимости, то связи с ним прерывается и мы его теряем.
На поле есть база. Квадрат с базой обозначен зеленым цветом с желтой рамкой. После выполнения задания, Робот должен вернуться на базу, в противном случае - миссия будет считаться проваленой.
Программу управления роботом можно писать на следующих языках программирования: Python, C++, Кумир. По мере развития робота у него будут появляться новые функции и возможности. О всех существующих функциях и возможностях робота, вы можете узнать на этой странице.
Структура программы
Структура программы для робота аналогичная структуре программы того языка программирования, на котором вы пищите.
| Python |
C++ |
Кумир |
| |
|
алг робот
нач
| напишите свою программу
команды для робота
кон
|
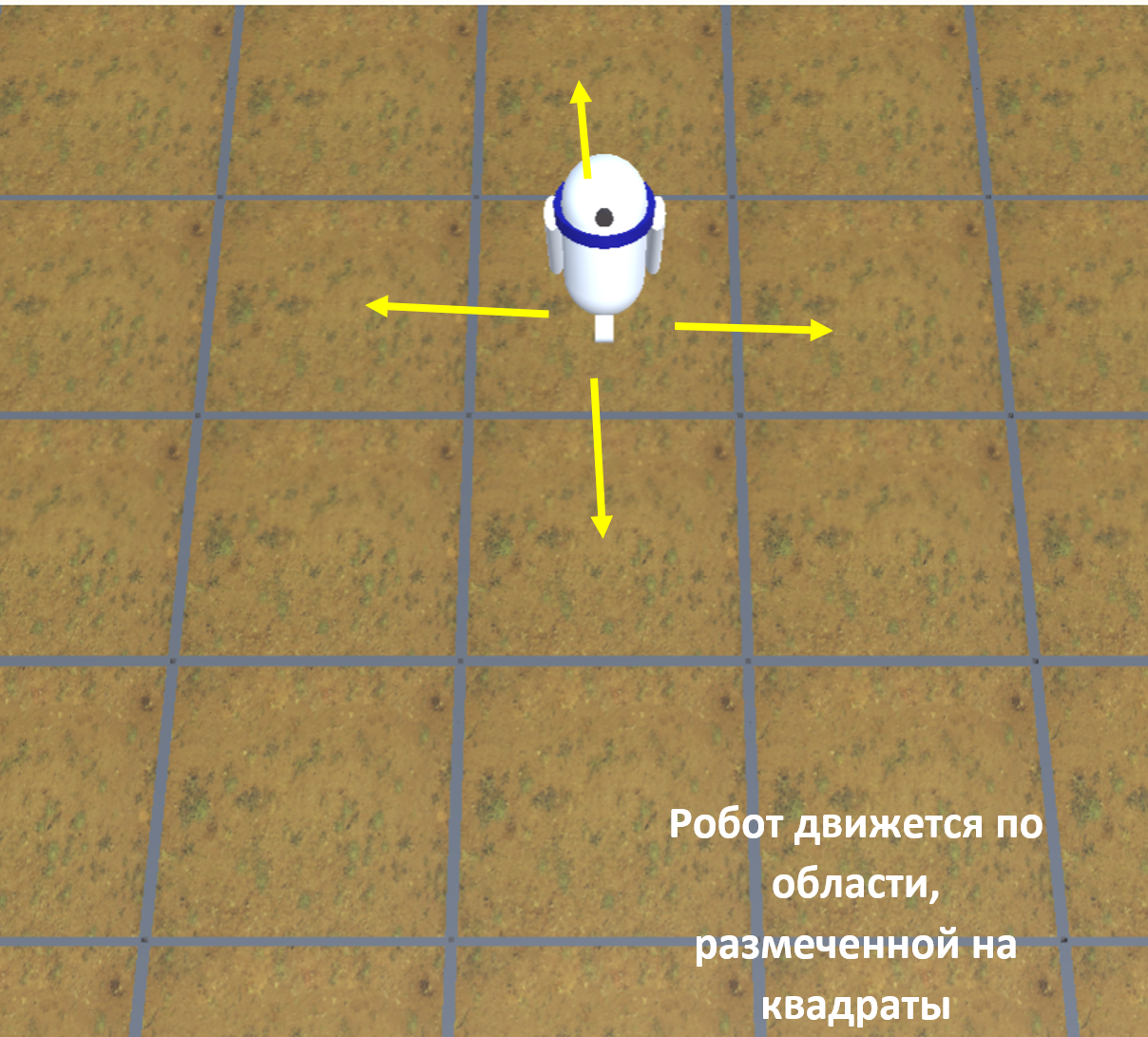
Движение робота
Робот умеет передвигаться на одну клетку в одну из четырех сторон, используя следующие команды:
| Python |
C++ |
Кумир |
|
вправо
влево
вверх
вниз
|
вправо;
влево;
вверх;
вниз;
каждая команда на C++ должна заканчиваться точкой с запятой (;)
|
вправо
влево
вверх
вниз
|
Робот Сильвер, как любой робот или компьютер, подчиняется инструкциям слепо и буквально. Он не может сам мыслить, так что все действия и команды должны быть выражены однозначно.
К примеру, если дать Роботу команду направо, то он уже ее не поймет!
Работа с элементами на поле
| Команда |
Python |
C++ |
Кумир |
| Взять груз |
cargo() |
cargo() |
взять |
| Положить груз |
pickup() |
pickup() |
поставить |
| Положить n монет в сундук (n - целое число, количество монет, которое необходимо роботу положить в сундук) |
put(n) |
put(n) |
положить(n) |
Датчики робота
Робот имеет датчики, которые помогают ему ориентироваться на поле.
| Python |
C++ |
Кумир |
|
стена_сверху
стена_справа
стена_снизу
стена_слева
|
|
|